Disclaimer
Performing these tasks is fraught with opportunities to destroy the ST5000 autopilot, the Benmar drive unit, or both. Take nothing here as directions on how to modify the Benmar drive to be controlled by the ST5000 - instead, this is a guide to understanding what I
did with my
drive unit. Your drive unit may be different.
Finally, if you are not comfortable with electricity and electronics, do not attempt
this conversion. You must be able to understand fully what needs to be done and you must take full responsibility for making the changes necessary on your drive.
I accept no liability for your failure to successfully convert a drive because:
- These directions may be faulty.
- Drive units may vary
- Your skill level may not be up to the task
- Your understanding may be incomplete
all of which can lead to failure and destruction of the ST5000, the drive unit, or both.
I know that what follows fails as a recipe for making the conversion. Actually that is on purpose. If someone were to blindly follow a recipe, it would almost certainly lead to an expensive failure.
That said, join me on
my journey to understand the ST5000, the Benmar drive, and learn what I did to convert my Benmar autopilot drive unit to make it compatible with my ST5000:
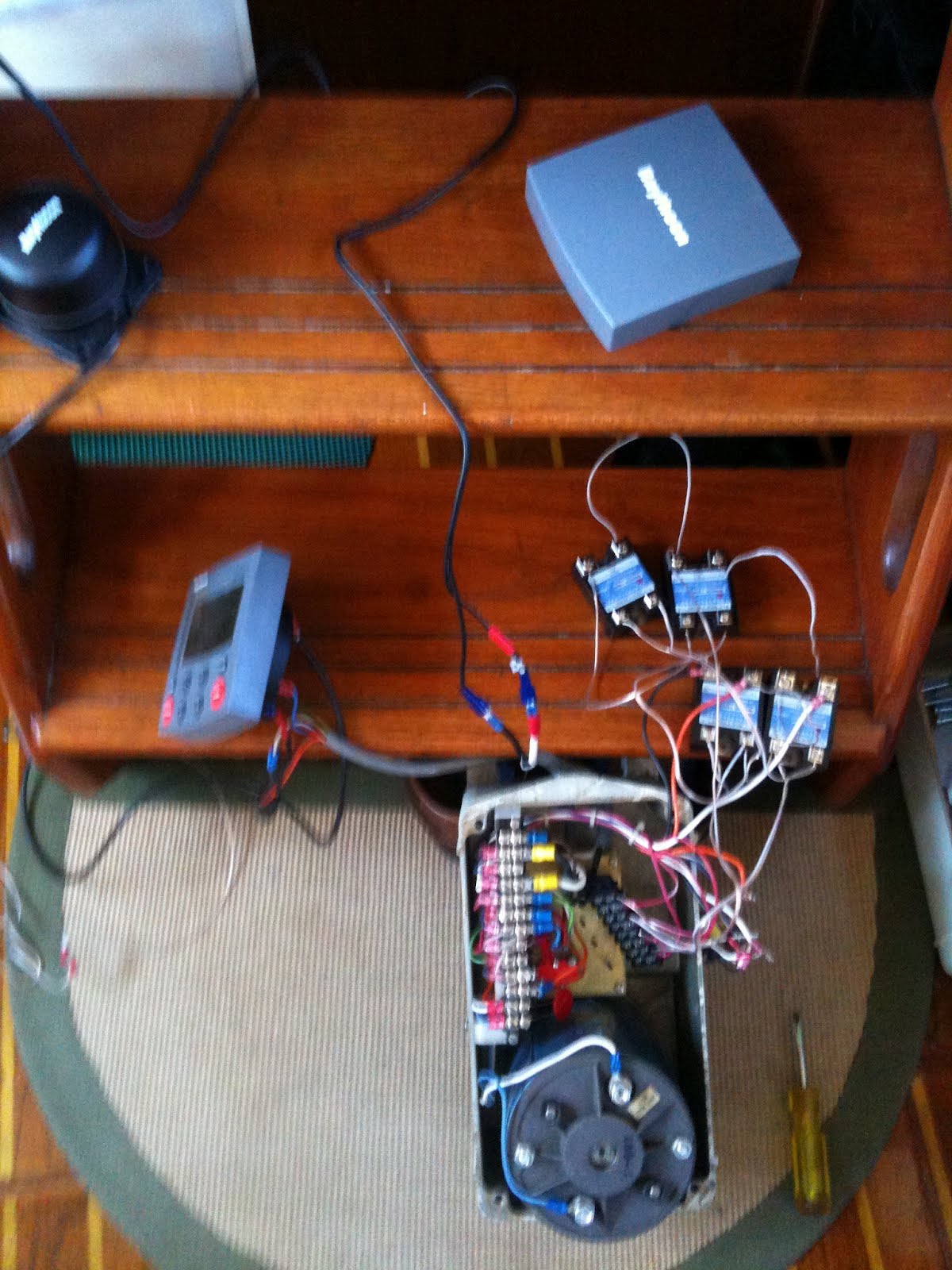
- Remove the cover from the drive unit. This is on the opposite end from the drive sprocket.
- Remove the two screws that hold the aluminum plate containing the two large and one small relays from the case, freeing the plate and its relays from the case.
- The two large relays control the drive motor, and the smaller relay controls the clutch. We will not disturb the clutch relay at this point.
- Locate the two heavy orange wires coming out of the wiring bundle and disconnect them from the relays. These wires each connect to one side of the motor.
- Locate the two thin red wires coming out of the wiring bundle and disconnect them from the relays. These come from the limit switches, and are one side of the relay control wires.
- Locate the two thin red wires with white stripes coming out of the wiring bundle and disconnect them from the relays. These are duplicates for the other side of the relay control wires.
- Locate the two heavy white wires coming out of the wiring bundle and disconnect them from the relays. These are the DC + feed. On one of the relays, you will also find a thin white wire under the same screw as the heavy white wire. Remove it too. You will also find that there are a white and a black wire going to the relays from a capacitor (silver cylinder) bolted to the aluminum plate. You may ignore these for the moment.
- Locate the two heavy black wires coming out of the wiring bundle and disconnect them from the relays. These are the DC - feed. On one of the relays, you will also find a thin black wire under the same screw as the heavy black wire. Remove it too.
- You should now find that the wire bundle is free, except for the two wires going to the capacitor, and the blue and white/blue stripe wires going to the clutch relay.
- Clip the nylon wire ties holding the bundle together and unthread the wires you have loosened. You will find that they fall nicely into two groups - one long and one short, each for the particular relay that they had been attached to. You will also find that you have freed a white and black wire pair going to the clutch relay.
- Looking at the underside of the aluminum plate, remove the single screw holding the clutch relay to the plate. This should now allow the plate and the still-attached old motor relays to be removed completely. Find a longer 6-32 screw and attach the clutch relay to the case thru one of the holes that used to hold the aluminum relay plate - the hole furthest from the corner of the case is the preferable mount point.
- Tho it might seem most convenient, we cannot simply attach the new SSR's to the aluminum plate in place of the old mechanical relays. The plate is not an adequate heat sink. We are going to use the cast aluminum case cover as the heat sink.
Now, a little rearrangement of the wiring on the big terminal block in the drive. The purpose of these changes is to reverse the connections to the limit switches so that the common wire is connected to one of the incoming control lines, and the individual switched connections will go to the diode-controlled control lines. The numbering is done counting from the end closest to the motor.
- Locate terminal 8. The incoming red wire will be attached here. On the other side of terminal 8, you will see a red/white stripe wire - relocate this wire to terminal 9, under the same screw as the red/white wire already on terminal 9. Now the incoming green control wire is connected to both red/white wires.
- Look at terminal 4. You will find an orange wire - relocate this to terminal 8. This connects the incoming red wire to the limit switch common connection.
- Install an MOV across terminals 1 & 2. This puts it directly across the motor terminals.
After these changes, the incoming green control wire is connected to both the red/white stripe control wires, and the incoming red wire is connected to the two red control wires, via the limit switches. The idea is that if a limit switch is tripped, the control signal for that rotation direction is interrupted, but the signal for the opposite rotation direction is unaffected, allowing the drive to be rotated away from an at-limit condition.
I installed an MOV across terminals 4 & 7 of the big terminal block - this puts the MOV across the coil of the clutch relay, protecting the ST5000 from inductive kicks from this coil.
Purchase an 8-terminal terminal strip - this will be used to insert the diodes in the 2 pairs of control wires. Pay very close attention to the diode polarity in the schematic - if they are reversed, the SSR's could fail to actuate, or incorrectly actuate creating a dead short across the 12V power, leading to at least the destruction of the SSR's.
Mount the SSR's to the inside of the case cover. Be sure that the mounting locations will not interfere with anything inside the drive unit when the cover is installed. Apply silicone to the aluminum plates on the back of the relays before screwing them in place to insure a sound thermal connection to the case.
Make the control connections on the relays from the new terminal strip containing the diodes, and make the inter-relay connections on the control lines.
At this point, before supplying the 12V power to the output terminals on the SSR's, I made a lash-up and actually powered up the ST5000 connected to the drive unit. I verified that when the ST5000 called for rotation, the opposite corners of the H-bridge were activated (the SSR's have LED's that lite when they are actuated).
Having confirmed my control wiring, I then made the motor and 12VDC connections to the SSR's output terminals. Connect the white and black wires from the clutch relay to any convenient white and black wires at the SSR's. I then used the ST5000 to actually turn the motor. I did this as a final check to confirm that I had things right, and to ensure that I did not have the wiring to the limit switches reversed. I didn't, but it was a 50-50 chance. If I had, then the limit switches would have failed to prevent over-rotation, and it would not have been possible to run the drive unit in the reverse direction to clear the over-rotation condition. If this had happened, I would have simply reversed the connections of the two red control wires coming from the new terminal strip.
Hookups at the ST5000: Everything I did presumed the re-use of the existing wire bundle going from the Benmar drive to the Benmar controller in the cockpit. Here is where the wires in the bundle at the cockpit need to connect to the ST5000:
- White: ST5000 DC + 12V power connection. Since the ST5000 is a delicate instrument, and is now used only to deliver control-level signals, it will draw very little current. I installed a 0.5 amp fast-blow fuse in the +12V power lead.
- Black: ST5000 DC - 12V power connection
- Blue: ST5000 + clutch connection. No negative clutch connection is required.
- Red and Green: ST5000 drive connections. Don't worry about which goes where - if the sense of the drive is wrong (it rotates the wrong way), just reverse these connections. The ST5000 also has a software switch for this.
Of course the compass and the rudder reference transducers will also need to be connected to the ST5000, but these are standard connections, done according to the factory manual.

Project ST5000: Step by step